ai-robot-wangqiuzhuang
Week 3: 机器人运动学核心概念与 ROS2 通信
本周概览
- Git SSH 密钥配置与 GitHub 交互
- VS Code + WSL 远程开发环境搭建
- ROS2 话题发布/订阅实战
- 机器人运动学初步:TF2 坐标变换
- URDF 机器人模型描述格式入门
1. Git SSH 密钥与远程仓库
为什么需要 SSH?
HTTPS 方式每次 push 都需要输入用户名和密码(或 token),而 SSH 方式配置一次后即可免密推送。
# 生成密钥(如未生成)
ssh-keygen -t ed25519 -C "your-email@example.com"
# 查看并复制公钥
cat ~/.ssh/id_ed25519.pub
# 测试连接
ssh -T git@github.com
# 成功输出: Hi wangqiuzhuang! You've successfully authenticated.
Git 常用指令
# 远程仓库管理
git remote -v # 查看远程地址
git remote add origin <url> # 添加远程仓库
git remote set-url origin <url> # 修改远程地址 (HTTPS→SSH)
# 分支操作
git branch # 查看分支
git checkout -b feature # 创建并切换分支
# 撤销操作
git reset --soft HEAD~1 # 撤销 commit 但保留更改
git restore <file> # 丢弃工作区更改
git restore --staged <file> # 取消暂存
2. VS Code + WSL 远程开发
配置步骤
- 在 Windows 下载安装 VS Code
- 安装扩展 WSL (
ms-vscode-remote.remote-wsl) - 安装扩展 ROS (
ms-iot.vscode-ros) - 在 WSL 终端中进入项目目录,输入
code . - VS Code 自动连接 WSL,左下角显示
WSL: Ubuntu
优势
- Windows 图形界面 + Linux 开发环境
- 完整的 IntelliSense 代码补全
- 集成终端直接使用 WSL shell
- 断点调试 ROS2 Python/C++ 节点
3. ROS2 话题通信实战
实验:发布速度指令控制小乌龟
终端 1 — 启动小乌龟节点:
ros2 run turtlesim turtlesim_node
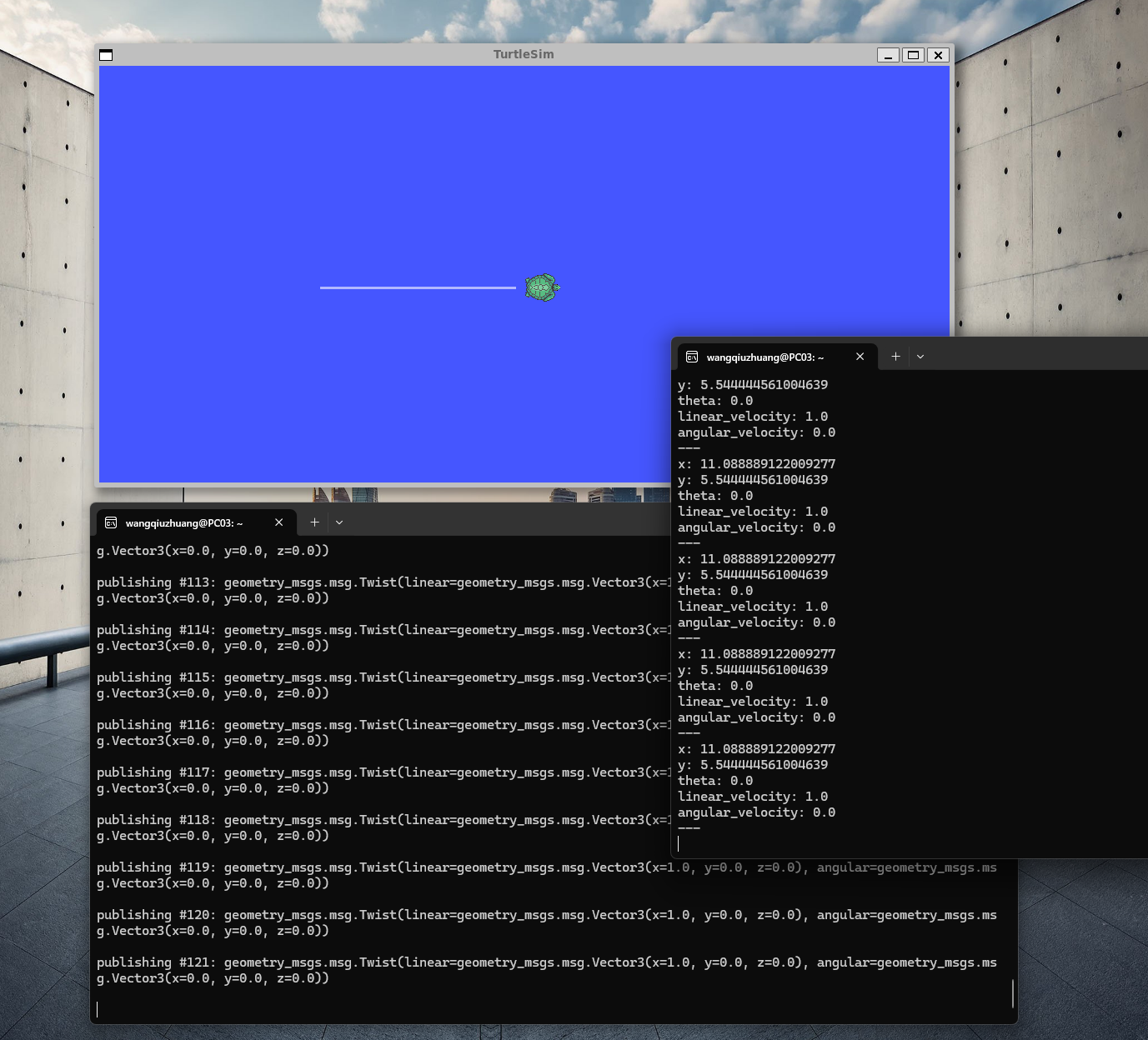
终端 2 — 监听小乌龟位置:
ros2 topic echo /turtle1/pose
每秒输出小乌龟的 x, y 坐标和 theta 朝向角。
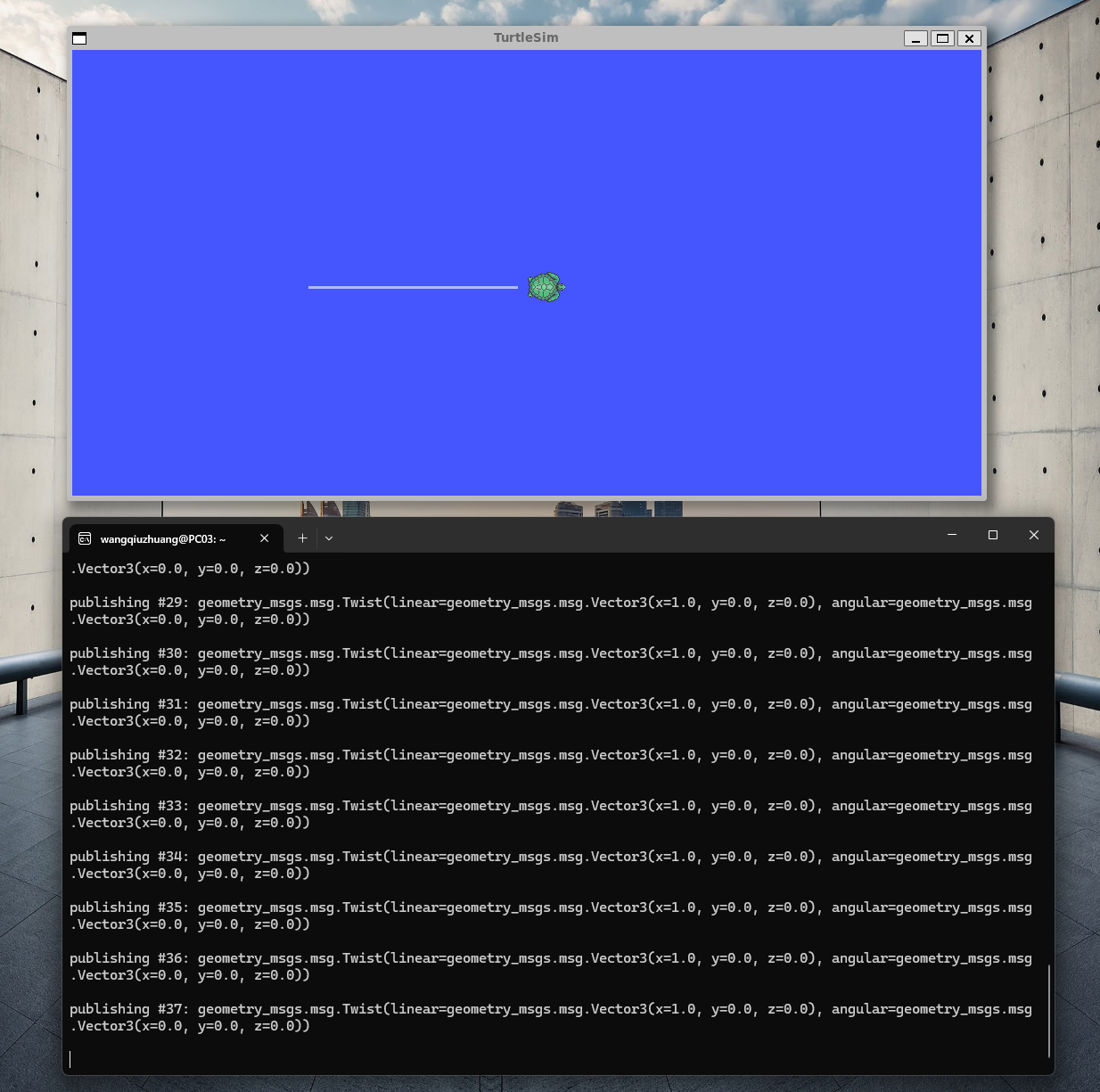
终端 3 — 发布速度指令让小乌龟移动:
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}"
💡 原理解析:
ros2 topic pub向/turtle1/cmd_vel话题发布一条 Twist 消息。turtlesim_node 订阅该话题,收到消息后更新小乌龟的位置。echo命令订阅/turtle1/pose话题,实时输出位置反馈,形成闭环控制。
小乌龟位置监听
小乌龟移动控制
4. TF2 坐标变换基础
TF2(Transform Library 2)是 ROS2 中管理多个坐标系之间变换关系的库。
核心概念
- 坐标帧 (Frame):机器人上定义的位置参考点(如
base_link,camera_link,laser_frame) - 变换 (Transform):两个帧之间的平移 + 旋转关系
- TF 树 (TF Tree):所有坐标帧构成的父子关系树
# 查看 TF 树
ros2 run tf2_tools view_frames
# 监听特定两个帧之间的变换
ros2 run tf2_ros tf2_echo frame_a frame_b
为什么需要 TF2?
在机器人系统中,不同传感器安装在不同位置。要把激光雷达的数据转换到机器人基座坐标系下,就需要知道雷达相对于基座的位姿变换。TF2 自动维护和插值这些变换关系。
5. URDF — 机器人统一描述格式
URDF(Unified Robot Description Format)是 XML 格式的机器人模型描述文件:
<?xml version="1.0"?>
<robot name="my_robot">
<!-- 基座连杆 -->
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.2" length="0.1"/>
</geometry>
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
</visual>
</link>
<!-- 关节连接 -->
<joint name="base_to_wheel" type="continuous">
<parent link="base_link"/>
<child link="wheel_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
</robot>
| 元素 | 说明 |
|---|---|
<link> |
机器人的刚性部件(连杆),定义几何形状、质量、惯性 |
<joint> |
连接两个连杆的关节,定义运动类型(旋转/平移/固定) |
<visual> |
可视化几何体(不影响物理仿真) |
<collision> |
碰撞检测几何体(影响物理仿真) |
踩坑记录
| 问题 | 原因 | 解决方案 |
|---|---|---|
git push 提示输入密码 |
未配置 SSH 或使用了 HTTPS 远程 | git remote set-url origin git@github.com:user/repo.git |
| VS Code 无法连接 WSL | WSL 未启动或版本过旧 | wsl --shutdown 后重开, 确保 WSL 版本 ≥2 |
ros2 topic pub 小乌龟不动 |
消息格式错误 | 用 Tab 键自动补全消息结构 |
colcon build 报错 |
缺少依赖 | rosdep install -i --from-path src --rosdistro humble -y |
总结
本周在 ROS2 操作能力上迈出了关键一步:
- Git 工作流熟练化:SSH 免密配置 + 常用分支/撤销指令
- VS Code 远程开发:打通了 Windows IDE + WSL Linux 的混合开发环境
- 话题通信实战:通过 pub/echo 完成了 ROS2 的核心通信机制验证
- TF2 与 URDF 概念:为后续多传感器融合和机器人建模仿真打下概念基础