ai-robot-wangqiuzhuang
Week 12: 远程摄像头流与 ArUco 标记识别 ⭐
🎯 冲A+核心周 — 本周实验打通了手机摄像头 → WSL → OpenCV 的完整数据链路
本周概览
- Tailscale 跨设备组网(WSL ↔ 手机)
- Termius SSH 远程终端连接
- 手机浏览器摄像头流实时传输到 Python/OpenCV
- ArUco 标记生成与实时识别
操作步骤
1. 课件地址
https://course.a-real.me/content/week12.html
2. WSL 安装 Tailscale
在 WSL 中执行 Tailscale 安装指令,使用 Google 账号登录完成设备注册:
3. 手机端安装 Tailscale
手机应用商店下载 Tailscale,使用与步骤 2 相同的 Google 账号登录。
4. 手机 SSH 远程连接 WSL
手机下载终端工具 Termius,使用 WSL 的用户名和密码远程连接:
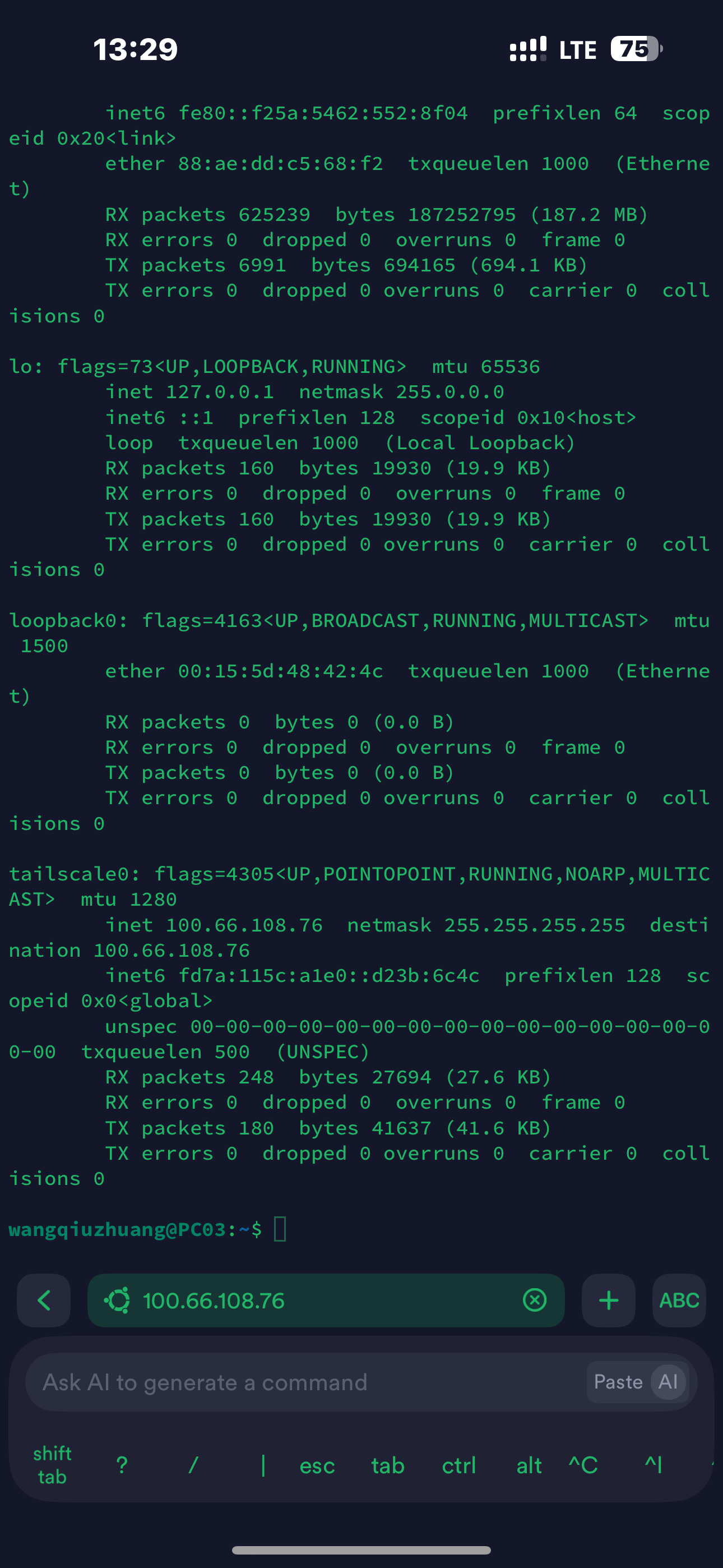
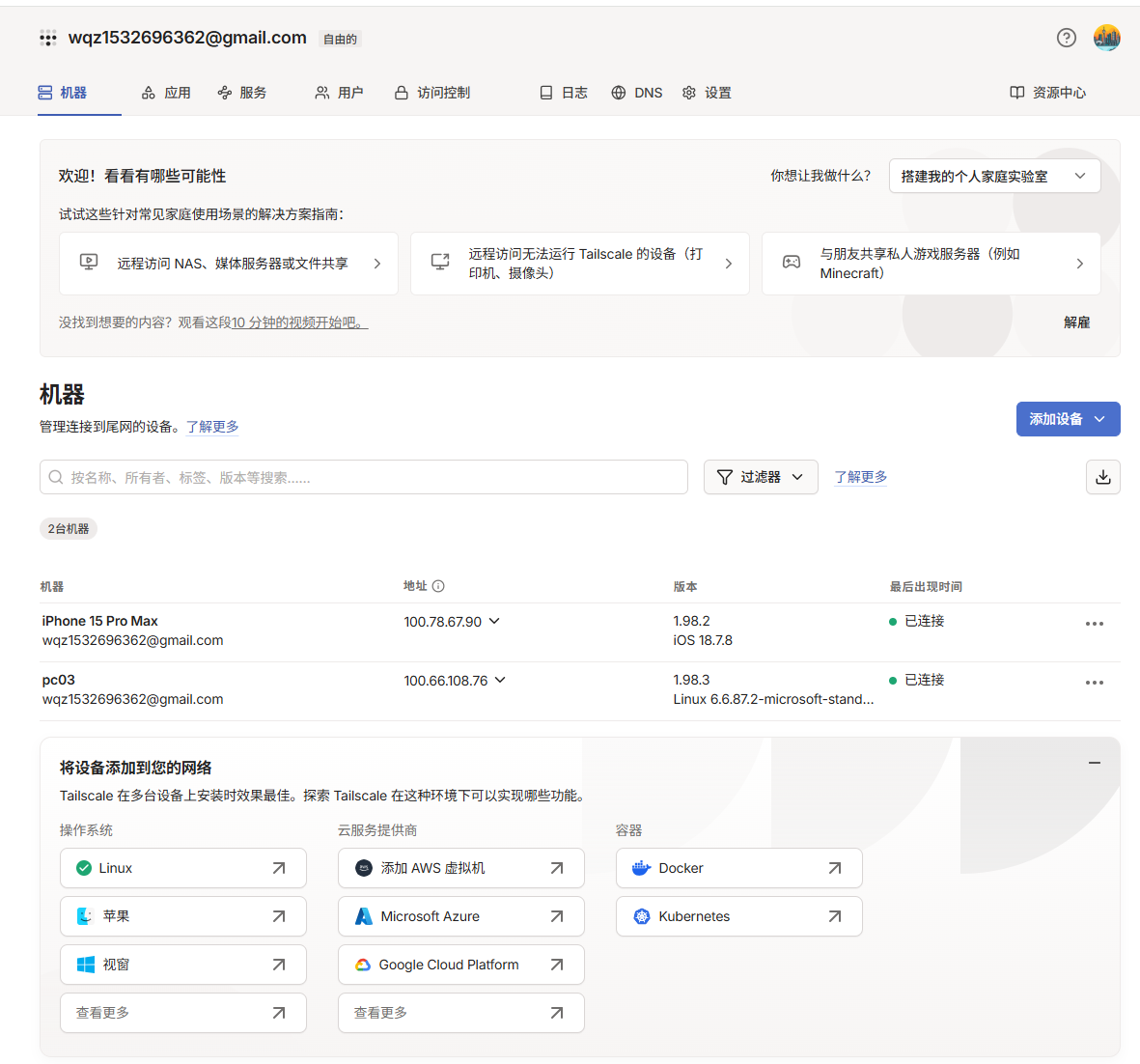
5. 验证设备互联
连接成功后,PC 端 Tailscale 控制台可以看到全部在线设备:
6. 安装 SSH 服务
在 WSL 中执行以下指令安装并启动 SSH 服务:

7. 克隆实验代码
git clone https://github.com/ai-robot-class/ai-robot-class.github.io.git
8. 安装 Python 依赖
进入项目目录,安装依赖:
cd ai-robot-class.github.io
pip install -r week12_starters/requirements.txt
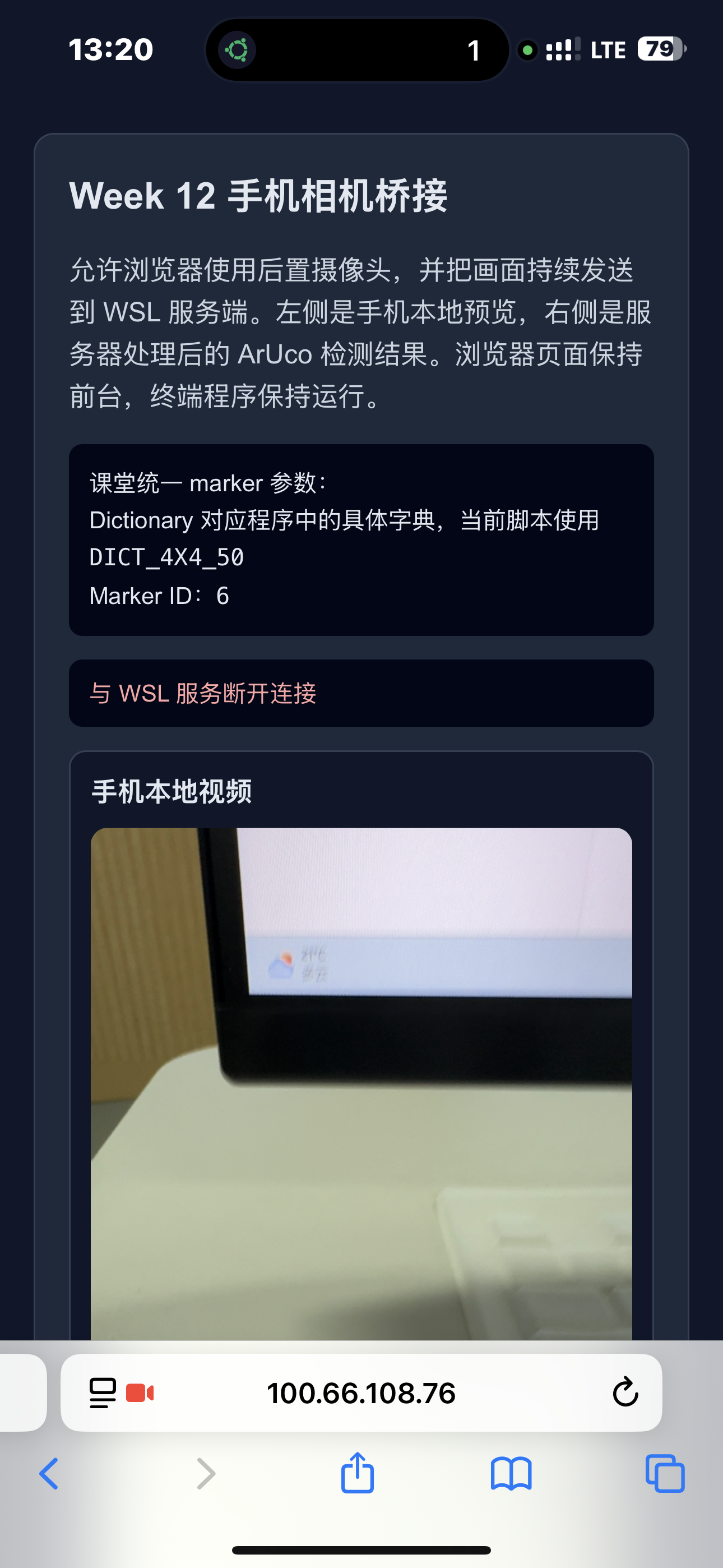
9. 手机浏览器访问摄像头页面
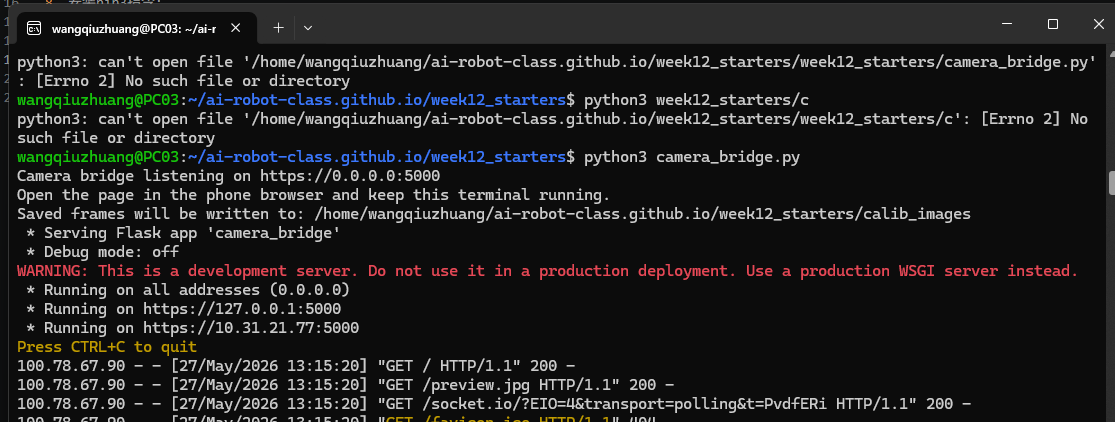
在手机浏览器中访问 http://<wsl-ip>:5000(IP 地址和端口以实际为准),页面会发起摄像头权限请求:
10. 验证视频流稳定性
手机画面能够稳定出现在 WSL 的 OpenCV 窗口中,实时视频流传输成功。
11. 代码架构解析
手机浏览器 (HTTPS 页面)
│ 调用摄像头
│ JPEG 帧 → WebSocket
▼
WSL Python 服务端
│ OpenCV 解码
│ 实时显示
▼
OpenCV 显示窗口
核心流程:WSL 托管 HTTPS 页面 → 手机浏览器打开页面 → 页面调用摄像头 → JPEG 帧通过 WebSocket 发送到 Python → OpenCV 解码并显示
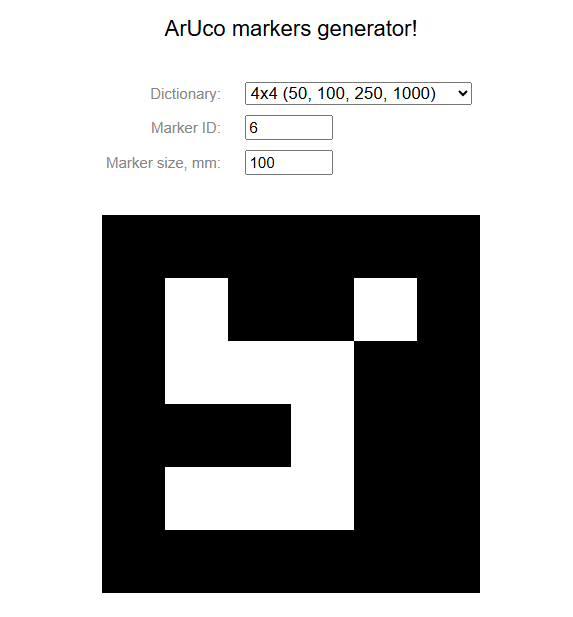
12. ArUco 标记生成与识别
访问 ArUco Marker Generator 在线生成 ArUco 标记:
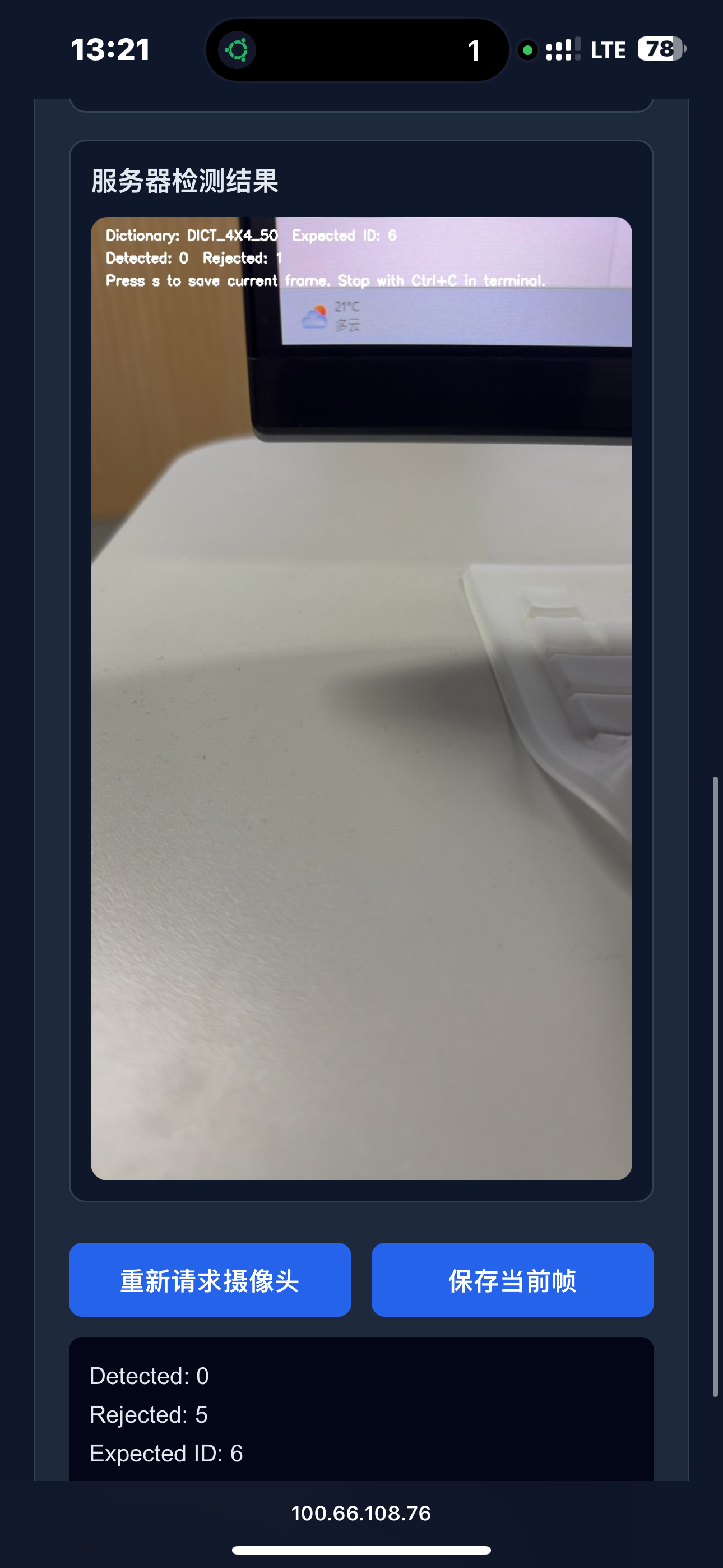
13. 刷新验证
刷新浏览器,重新获取摄像头权限,触发摄像头重新取样关键帧:
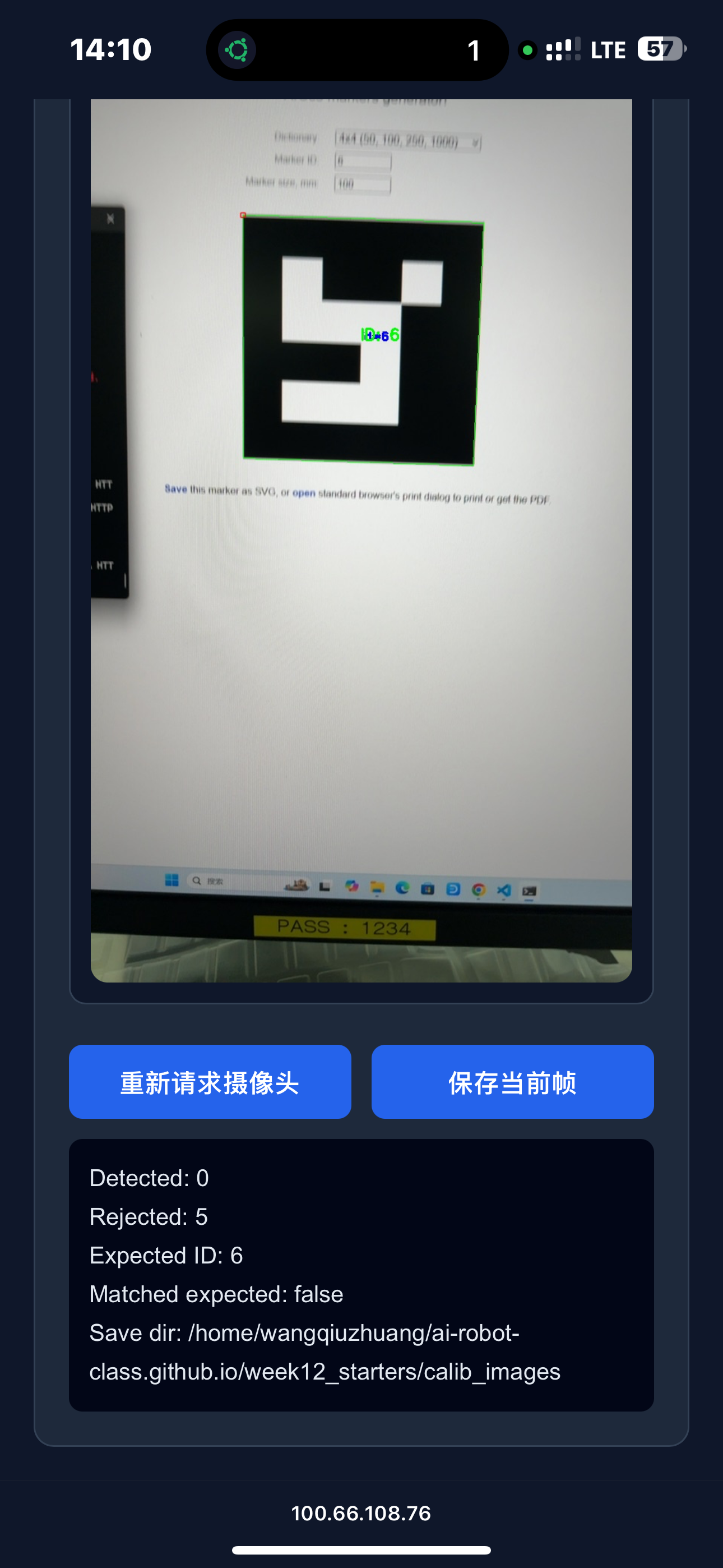
14. 验证结果
解析得到的 ArUco 数据与输入的图像数据一致,任务完成!✅
踩坑记录
| 问题 | 原因 | 解决方案 |
|---|---|---|
| 浏览器刷新一直超时 | WSL 中运行的程序端口挂起 | 杀死 WSL 中运行的程序,重新 run 后浏览器刷新秒入 |
总结
本周是课程中的 冲A+核心实验,成功搭建了跨设备的实时摄像头流传输链路,打通了「手机摄像头 → Tailscale 组网 → WSL Python/OpenCV → ArUco 识别」的完整数据管道。这一架构可扩展至远程机器人视觉、移动端 AI 推理等实际应用场景。