ai-robot-wangqiuzhuang
Week 4: 机器视觉与 OpenCV 基础实验
本周概览
- 计算机网络基础:IP 地址、DNS、局域网/广域网
- SSH 安全外壳协议
- Linux 常用命令与文件操作
- PyBullet 物理引擎入门:Laikago 机器狗仿真
- Python + ROS2 控制小乌龟移动
1. 计算机网络基础
IP 地址体系
| 概念 | 说明 | 示例 |
|---|---|---|
| IPv4 | 32位地址,点分十进制 | 192.168.1.1 |
| IPv6 | 128位地址,冒号十六进制 | 2001:db8::1 (教育网常用) |
| DNS | 域名→IP 的解析服务 | baidu.com → 110.242.68.66 |
| 回环地址 | 本机自通信 | 127.0.0.1 |
| 局域网 (LAN) | 同一路由器下的私有网络 | 192.168.x.x |
| 广域网 (WAN) | 互联网范围的公网 | 通过 ip138.com 查询公网 IP |
网络连通性测试
# ping — 测试网络可达性
ping 8.8.8.8 # Google DNS
ping www.baidu.com # 域名解析 + 连通
# 查看本机 IP
ip addr show # Linux
ipconfig # Windows
💡 公网 vs 内网:家庭路由器使用 NAT(网络地址转换)将多个设备的内网 IP 映射到一个公网 IP,实现共享上网。
2. SSH 安全外壳协议
SSH (Secure Shell) 通过加密通道实现安全的远程登录和命令执行:
# 基本格式
ssh 用户名@远程主机地址
# 示例
ssh wangqiuzhuang@192.168.1.100
# 使用 SSH 密钥(免密登录)
ssh-copy-id wangqiuzhuang@192.168.1.100 # 复制公钥到远程
ssh wangqiuzhuang@192.168.1.100 # 之后无需密码
原理:SSH 使用非对称加密建立安全通道。首次连接时交换公钥,后续通信使用对称加密保证效率。
3. Linux 常用文件操作指令
pwd # 输出当前目录的绝对路径
ls # 列出当前目录下的文件
ls -la # 详细列表(含隐藏文件、权限、大小)
cd <目录路径> # 切换工作目录
mkdir <目录名> # 创建新目录
mv <源> <目标> # 移动或重命名文件/目录
cp <源> <目标> # 复制文件
rm <文件名> # 删除文件
rm -r <目录名> # 递归删除目录
cat <文件名> # 查看文件内容
4. PyBullet 机器狗仿真
什么是 PyBullet?
PyBullet 是 Bullet Physics 引擎的 Python 封装,支持刚体动力学仿真、碰撞检测、机器人运动学等。它是目前学术界和工业界广泛使用的开源物理引擎。
运行 Laikago 四足机器人仿真
# 克隆 PyBullet 示例代码
git clone https://github.com/bulletphysics/pybullet_robots
# 进入目录
cd pybullet_robots
# 运行 Laikago 机器狗仿真
python3 laikago.py
修改关节参数 — 放倒机器狗
laikago.py 中控制机器狗姿态的关键代码模式:
# 遍历所有关节并设置角度
for joint in range(p.getNumJoints(robot_id)):
# 关闭位置控制,切换到力矩控制
p.setJointMotorControl2(
bodyIndex=robot_id,
jointIndex=joint,
controlMode=p.VELOCITY_CONTROL,
targetVelocity=0,
force=0
)
通过修改关节目标角度,可以改变机器狗的站立姿态,甚至放倒机器狗。
放倒机器狗
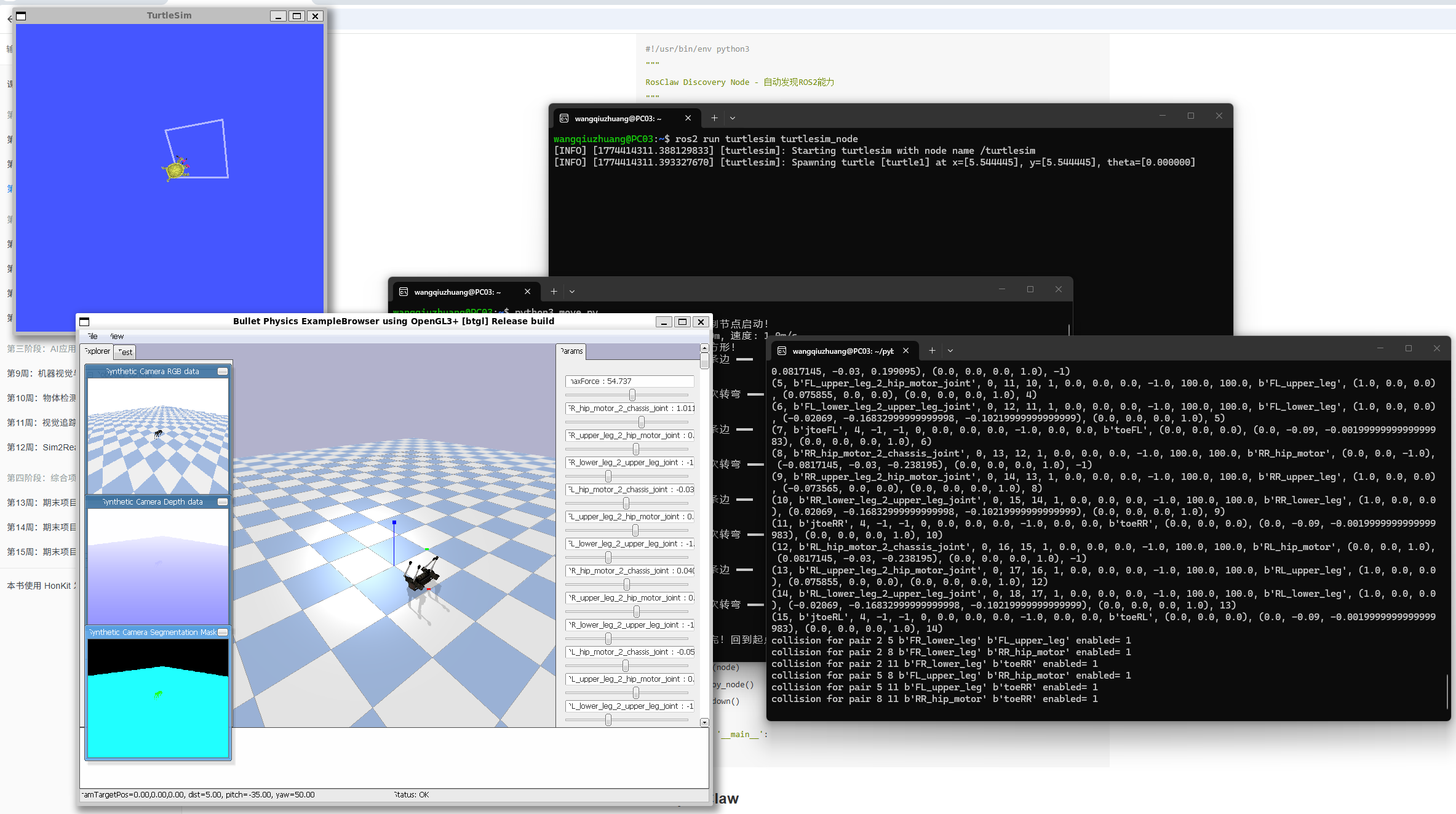
5. Python 控制小乌龟
使用 Python 脚本替代命令行工具来控制 turtlesim,实现更精确轨迹控制:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class TurtleController(Node):
def __init__(self):
super().__init__('turtle_controller')
self.publisher = self.create_publisher(
Twist, '/turtle1/cmd_vel', 10)
self.timer = self.create_timer(0.5, self.move)
def move(self):
msg = Twist()
msg.linear.x = 1.0 # 前进速度
msg.angular.z = 0.5 # 旋转速度(画弧线)
self.publisher.publish(msg)
def main():
rclpy.init()
rclpy.spin(TurtleController())
rclpy.shutdown()
完整代码参见课件:course.a-real.me/content/week3.html
小乌龟走正方向
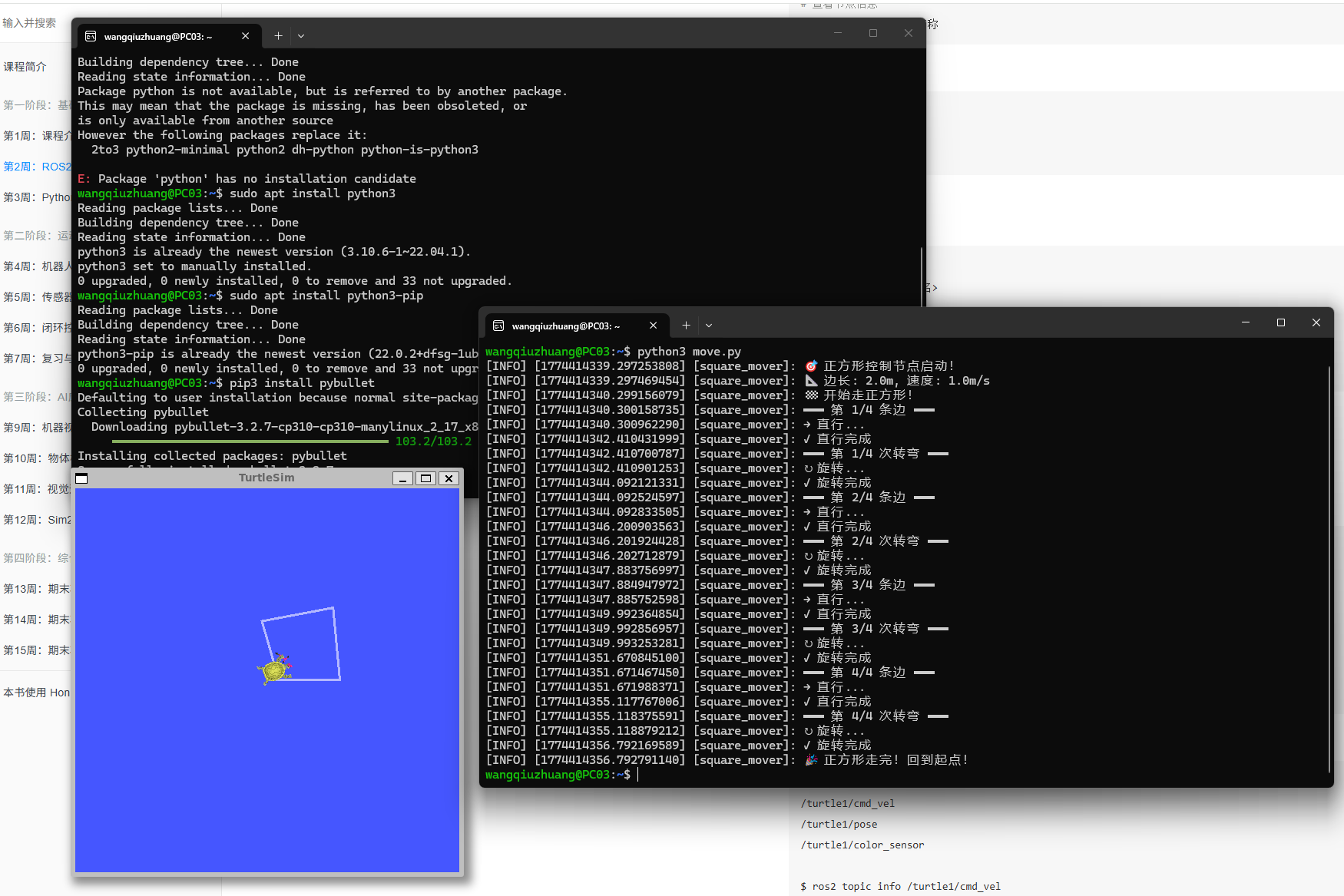
踩坑记录
| 问题 | 原因 | 解决方案 |
|---|---|---|
python3 laikago.py 报错 no module ‘pybullet’ |
未安装 PyBullet | pip3 install pybullet |
| PyBullet 窗口显示异常 | WSL 图形转发未配置 | 安装 VcXsrv 并设置 export DISPLAY=:0 |
| 机器狗放倒后无法恢复 | 力矩控制下关节自由掉落 | 重新启动仿真即可 |
| SSH 连接超时 | 防火墙阻拦 / 服务未启动 | sudo ufw allow 22,sudo systemctl start sshd |
总结
本周从网络基础到机器人仿真,建立了机器人开发的完整底层认知:
- 网络通信:理解了 IP/DNS/NAT/SSH 在机器人远程控制中的作用
- Linux 操作:掌握了文件管理的核心命令行工具
- PyBullet 仿真:完成了四足机器狗的加载、关节修改和姿态控制
- Python-ROS2 交互:用代码替代命令行实现了小乌龟的精确运动控制
为后续 Docker 容器化和传感器数据处理提供了网络和仿真的基础能力。