ai-robot-wangqiuzhuang
Week 6: 传感器数据处理与 KITTI 数据集实验
本周概览
- 机器人常用传感器类型与原理
- ROS2 传感器消息类型
- KITTI 自动驾驶数据集简介
- RViz2 传感器数据可视化
- RQT 数据流调试工具
1. 机器人常用传感器
传感器分类
| 传感器 | 数据类型 | 用途 | ROS2 消息类型 |
|---|---|---|---|
| RGB 相机 | 2D 图像 | 物体检测、识别、跟踪 | sensor_msgs/Image |
| 激光雷达 (LiDAR) | 3D 点云 | 建图、定位、避障 | sensor_msgs/PointCloud2 |
| IMU | 加速度 + 角速度 | 姿态估计、里程计 | sensor_msgs/Imu |
| GPS | 经纬度 + 海拔 | 全局定位 | sensor_msgs/NavSatFix |
| 超声波 | 距离值 | 近距离避障 | sensor_msgs/Range |
激光雷达原理
LiDAR (Light Detection and Ranging) 发射激光束,通过测量反射时间计算距离:
距离 = (光速 × 飞行时间) / 2
360° 扫描 → 64/128 线束 → 每秒百万级点云数据
2. KITTI 数据集
KITTI 是自动驾驶领域最知名的公开数据集之一,由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创建。
数据集内容
KITTI/
├── image_02/ # 左彩色相机图像
├── image_03/ # 右彩色相机图像
├── velodyne/ # 64线激光雷达点云
├── calib/ # 传感器标定参数
└── oxts/ # GPS/IMU 数据
传感器配置
车辆顶部安装 64 线 Velodyne HDL-64E 激光雷达,同时搭载 4 个相机(2 彩色 + 2 灰度),构成完整的多模态感知系统。
3. ROS2 传感器实验
RQT — 可视化调试工具
RQT 是 ROS2 的插件化图形调试工具,支持话题监控、节点图可视化、数据绘图等功能:
# 启动 RQT
rqt
# 常用插件
# - rqt_graph: 节点/话题关系图
# - rqt_plot: 话题数据实时曲线
# - rqt_image_view: 图像话题预览
# - rqt_console: 日志过滤器
实验步骤
- 加载 KITTI 数据集到 ROS2 环境
- 发布相机图像和 LiDAR 点云到对应话题
- 使用 RViz2 进行 3D 可视化
- 截取车辆不同视角的相机画面
ROS2 传感器数据
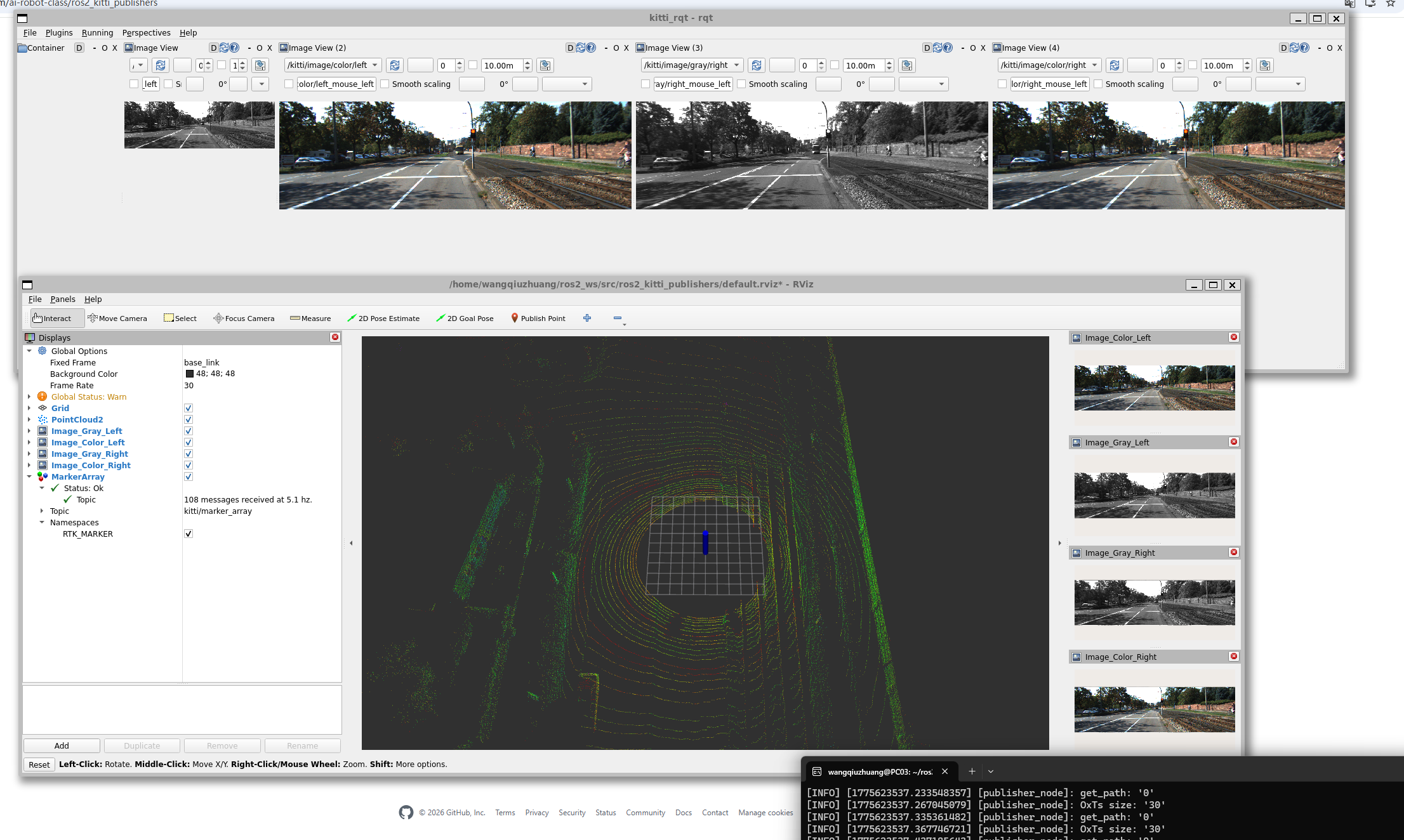
RQT 数据流监控
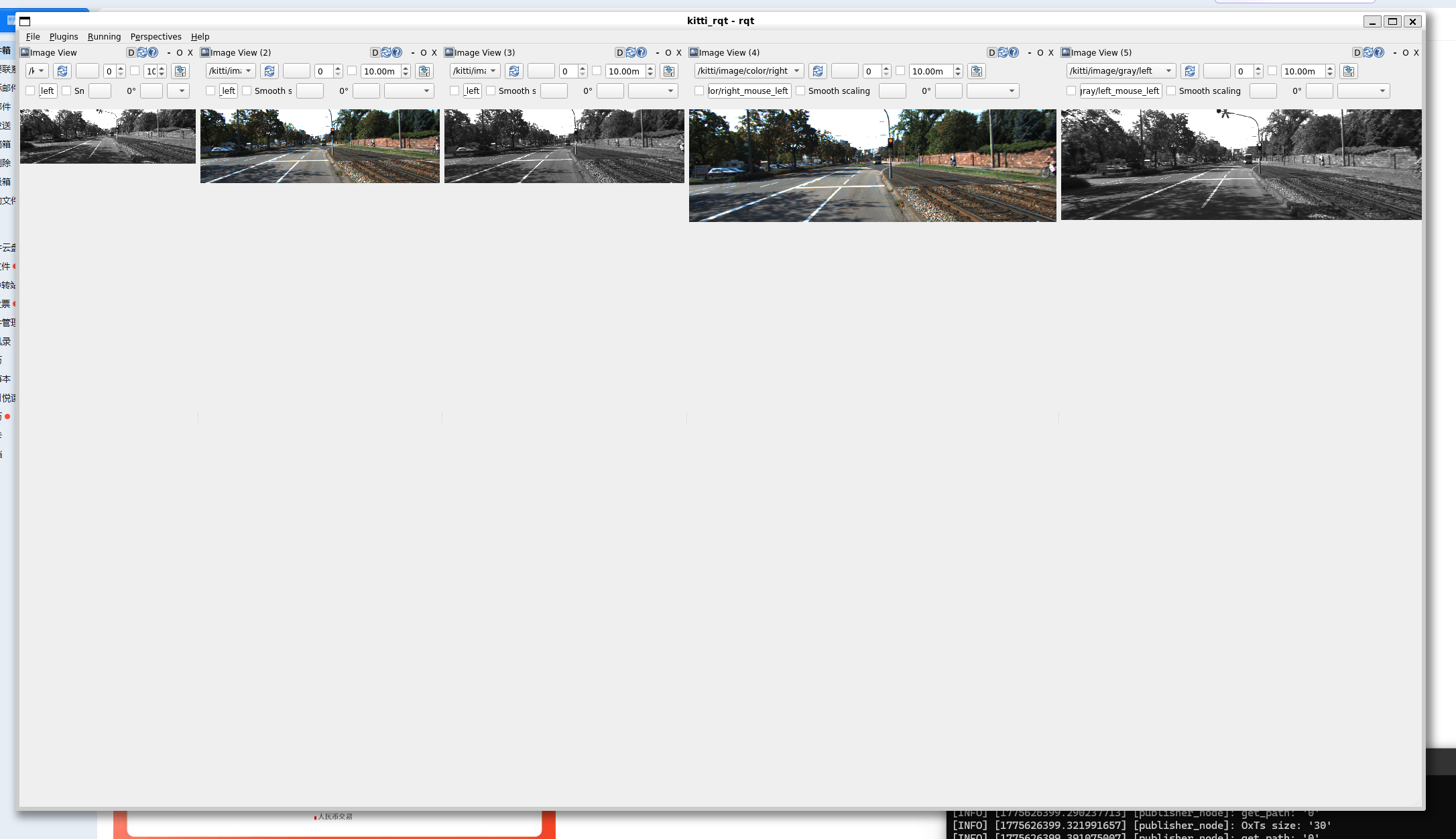
4. 多视角截图展示
车辆摄像头视角说明
| 视角 | 相机位置 | 用途 |
|---|---|---|
| 前视 (Front) | 挡风玻璃后方 | 车道线、交通标志、前车检测 |
| 左前 (Front-Left) | 左后视镜区域 | 左侧盲区、变道辅助 |
| 右前 (Front-Right) | 右后视镜区域 | 右侧盲区、变道辅助 |
| 后视 (Rear) | 后挡风玻璃 | 倒车、后方来车检测 |
踩坑记录
| 问题 | 原因 | 解决方案 |
|---|---|---|
| RViz2 无法显示点云 | 未设置 Fixed Frame | 在 RViz2 中将 Fixed Frame 设为 velodyne |
| RQT 启动报错 | 插件未安装 | sudo apt install ros-humble-rqt-* |
| KITTI 数据加载失败 | 文件路径不匹配 | 检查 bag 文件中的 topic 名称与实际一致 |
| 点云显示为散乱噪点 | 未正确设置 Intrinsics | 在 RViz2 中调整 PointCloud2 显示的 Decay Time |
总结
本周从传感器理论到数据可视化完成了完整的感知数据处理流程:
- 传感器认知:掌握了相机、LiDAR、IMU、GPS 的工作原理和 ROS2 消息格式
- KITTI 数据集:理解了自动驾驶数据集的采集方式和组织结构
- 可视化工具:熟练使用 RViz2 进行 3D 点云/图像显示,RQT 进行话题级调试
- 多视角理解:通过摄像头视角切换加深了对自动驾驶感知系统的整体认识
为后续 Docker 容器中的传感器处理和四足机器人感知模块开发提供了数据基础。